PyDiffGame
![]()
![]()
![]()
What is this?
PyDiffGame is a Python implementation of a Nash Equilibrium solution to Differential Games, based on a reduction of Game Hamilton-Bellman-Jacobi (GHJB) equations to Game Algebraic and Differential Riccati equations, associated with Multi-Objective Dynamical Control Systems
The method relies on the formulation given in:
-
The thesis work “Differential Games for Compositional Handling of Competing Control Tasks” (Research Gate)
-
The conference article “Composition of Dynamic Control Objectives Based on Differential Games” (IEEE | Research Gate)
If you use this work, please cite our paper:
@conference{med_paper,
author={Kricheli, Joshua Shay and Sadon, Aviran and Arogeti, Shai and Regev, Shimon and Weiss, Gera},
booktitle={29th Mediterranean Conference on Control and Automation (MED)},
title=,
year={2021},
pages={298-304},
doi={10.1109/MED51440.2021.9480269}}
Installation
To install this package run this from the command prompt:
pip install PyDiffGame
The package was tested for Python >= 3.10, along with the listed packages versions in requirments.txt
Input Parameters
The package defines an abstract class PyDiffGame.py. An object of this class represents an instance of differential game.
The input parameters to instantiate a PyDiffGame object are:
A:np.arrayof shape $(n,n)$System dynamics matrix
B:np.arrayof shape $(n, m_1 + … + m_N)$, optionalInput matrix for all virtual control objectives
Bs:Sequenceofnp.arrayobjects of len $(N)$, each array $B_i$ of shape $(n,m_i)$, optionalInput matrices for each virtual control objective
Qs:Sequenceofnp.arrayobjects of len $(N)$, each array $Q_i$ of shape $(n,n)$, optionalState weight matrices for each virtual control objective
Rs:Sequenceofnp.arrayobjects of len $(N)$, each array $R_i$ of shape $(m_i,m_i)$, optionalInput weight matrices for each virtual control objective
Ms:Sequenceofnp.arrayobjects of len $(N)$, each array $M_i$ of shape $(m_i,m)$, optionalDecomposition matrices for each virtual control objective
objectives:SequenceofObjectiveobjects of len $(N)$, each $O_i$ specifying $Q_i, R_i$ and $M_i$, optionalDesired objectives for the game
x_0:np.arrayof len $(n)$, optionalInitial state vector
x_T:np.arrayof len $(n)$, optionalFinal state vector, in case of signal tracking
T_f: positivefloat, optionalSystem dynamics horizon. Should be given in the case of finite horizon
P_f:listofnp.arrayobjects of len $(N)$, each array $P_{f_i}$ of shape $(n,n)$, optional, default = uncoupled solution ofscipy's solve_areFinal condition for the Riccati equation array. Should be given in the case of finite horizon
state_variables_names:Sequenceofstrobjects of len $(N)$, optionalThe state variables’ names to display when plotting
show_legend:boolean, optionalIndicates whether to display a legend in the plots
state_variables_names:Sequenceofstrobjects of len $(n)$, optionalThe state variables’ names to display
epsilon_x:floatin the interval $(0,1)$, optionalNumerical convergence threshold for the state vector of the system
epsilon_P:floatin the interval $(0,1)$, optionalNumerical convergence threshold for the matrices P_i
L: positiveint, optionalNumber of data points
eta: positiveint, optionalThe number of last matrix norms to consider for convergence
debug:boolean, optionalIndicates whether to display debug information
Tutorial
To demonstrate the use of the package, we provide a few running examples. Consider the following system of masses and springs:

The performance of the system under the use of the suggested method is compared with that of a Linear Quadratic Regulator (LQR). For that purpose, class named PyDiffGameLQRComparison is defined. A comparison of a system should subclass this class.
As an example, for the masses and springs system, consider the following instantiation of an MassesWithSpringsComparison object:
import numpy as np
from PyDiffGame.examples.MassesWithSpringsComparison import MassesWithSpringsComparison
N = 2
k = 10
m = 50
r = 1
epsilon_x = 10e-8
epsilon_P = 10e-8
q = [[500, 2000], [500, 250]]
x_0 = np.array([10 * i for i in range(1, N + 1)] + [0] * N)
x_T = x_0 * 10 if N == 2 else np.array([(10 * i) ** 3 for i in range(1, N + 1)] + [0] * N)
T_f = 25
masses_with_springs = MassesWithSpringsComparison(N=N,
m=m,
k=k,
q=q,
r=r,
x_0=x_0,
x_T=x_T,
T_f=T_f,
epsilon_x=epsilon_x,
epsilon_P=epsilon_P)
Consider the constructor of the class MassesWithSpringsComparison:
import numpy as np
from typing import Sequence, Optional
from PyDiffGame.PyDiffGame import PyDiffGame
from PyDiffGame.PyDiffGameLQRComparison import PyDiffGameLQRComparison
from PyDiffGame.Objective import GameObjective, LQRObjective
class MassesWithSpringsComparison(PyDiffGameLQRComparison):
def __init__(self,
N: int,
m: float,
k: float,
q: float | Sequence[float] | Sequence[Sequence[float]],
r: float,
Ms: Optional[Sequence[np.array]] = None,
x_0: Optional[np.array] = None,
x_T: Optional[np.array] = None,
T_f: Optional[float] = None,
epsilon_x: Optional[float] = PyDiffGame.epsilon_x_default,
epsilon_P: Optional[float] = PyDiffGame.epsilon_P_default,
L: Optional[int] = PyDiffGame.L_default,
eta: Optional[int] = PyDiffGame.eta_default):
I_N = np.eye(N)
Z_N = np.zeros((N, N))
M_masses = m * I_N
K = k * (2 * I_N - np.array([[int(abs(i - j) == 1) for j in range(N)] for i in range(N)]))
M_masses_inv = np.linalg.inv(M_masses)
M_inv_K = M_masses_inv @ K
if Ms is None:
eigenvectors = np.linalg.eig(M_inv_K)[1]
Ms = [eigenvector.reshape(1, N) for eigenvector in eigenvectors]
A = np.block([[Z_N, I_N],
[-M_inv_K, Z_N]])
B = np.block([[Z_N],
[M_masses_inv]])
Qs = [np.diag([0.0] * i + [q] + [0.0] * (N - 1) + [q] + [0.0] * (N - i - 1))
if isinstance(q, (int, float)) else
np.diag([0.0] * i + [q[i]] + [0.0] * (N - 1) + [q[i]] + [0.0] * (N - i - 1)) for i in range(N)]
M = np.concatenate(Ms,
axis=0)
assert np.all(np.abs(np.linalg.inv(M) - M.T) < 10e-12)
Q_mat = np.kron(a=np.eye(2),
b=M)
Qs = [Q_mat.T @ Q @ Q_mat for Q in Qs]
Rs = [np.array([r])] * N
R_lqr = 1 / 4 * r * I_N
Q_lqr = q * np.eye(2 * N) if isinstance(q, (int, float)) else np.diag(2 * q)
state_variables_names = ['x_{' + str(i) + '}' for i in range(1, N + 1)] + \
['\\dot{x}_{' + str(i) + '}' for i in range(1, N + 1)]
args = {'A': A,
'B': B,
'x_0': x_0,
'x_T': x_T,
'T_f': T_f,
'state_variables_names': state_variables_names,
'epsilon_x': epsilon_x,
'epsilon_P': epsilon_P,
'L': L,
'eta': eta}
lqr_objective = [LQRObjective(Q=Q_lqr,
R_ii=R_lqr)]
game_objectives = [GameObjective(Q=Q,
R_ii=R,
M_i=M_i) for Q, R, M_i in zip(Qs, Rs, Ms)]
games_objectives = [lqr_objective,
game_objectives]
super().__init__(args=args,
M=M,
games_objectives=games_objectives,
continuous=True)
Finally, consider calling the masses_with_springs object as follows:
output_variables_names = ['$\\frac{x_1 + x_2}{\\sqrt{2}}$',
'$\\frac{x_2 - x_1}{\\sqrt{2}}$',
'$\\frac{\\dot{x}_1 + \\dot{x}_2}{\\sqrt{2}}$',
'$\\frac{\\dot{x}_2 - \\dot{x}_1}{\\sqrt{2}}$']
masses_with_springs(plot_state_spaces=True,
plot_Mx=True,
output_variables_names=output_variables_names,
save_figure=True)
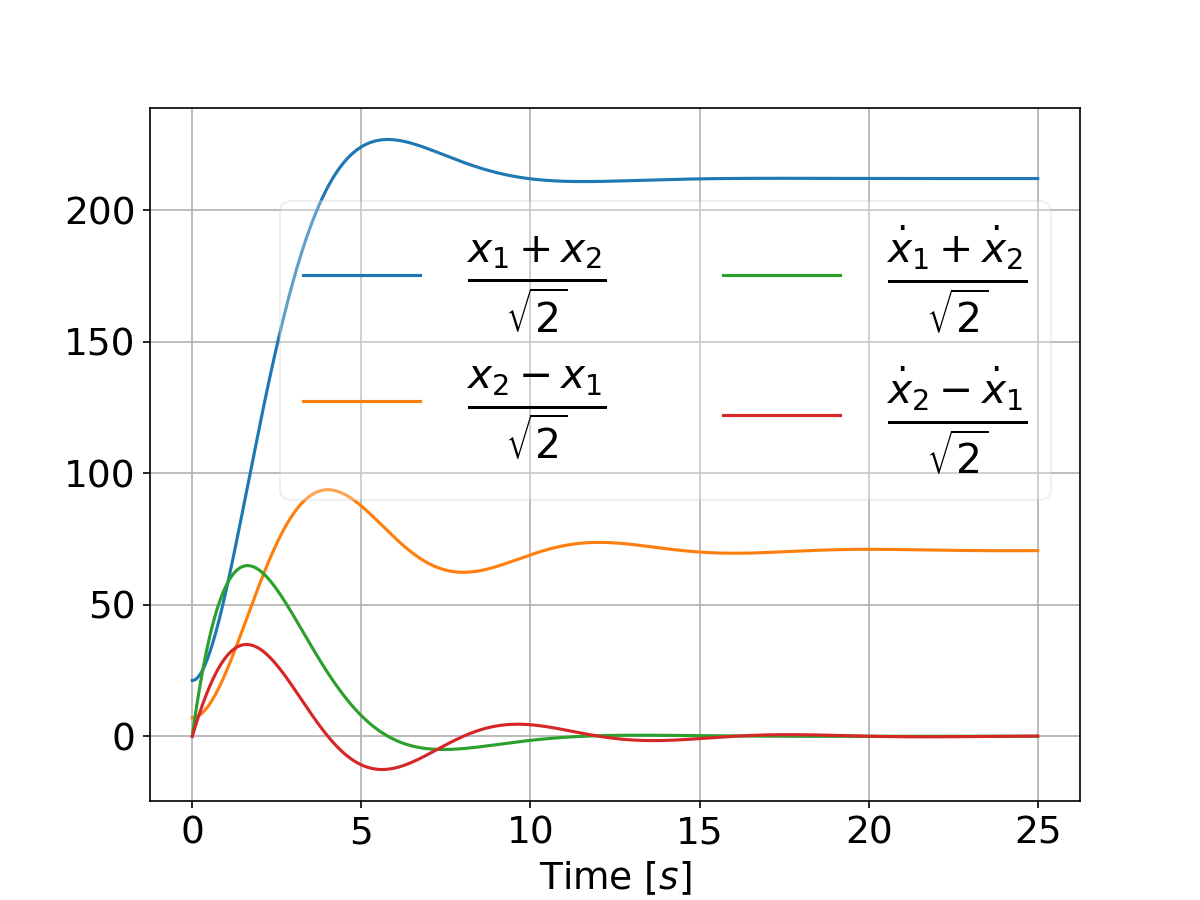
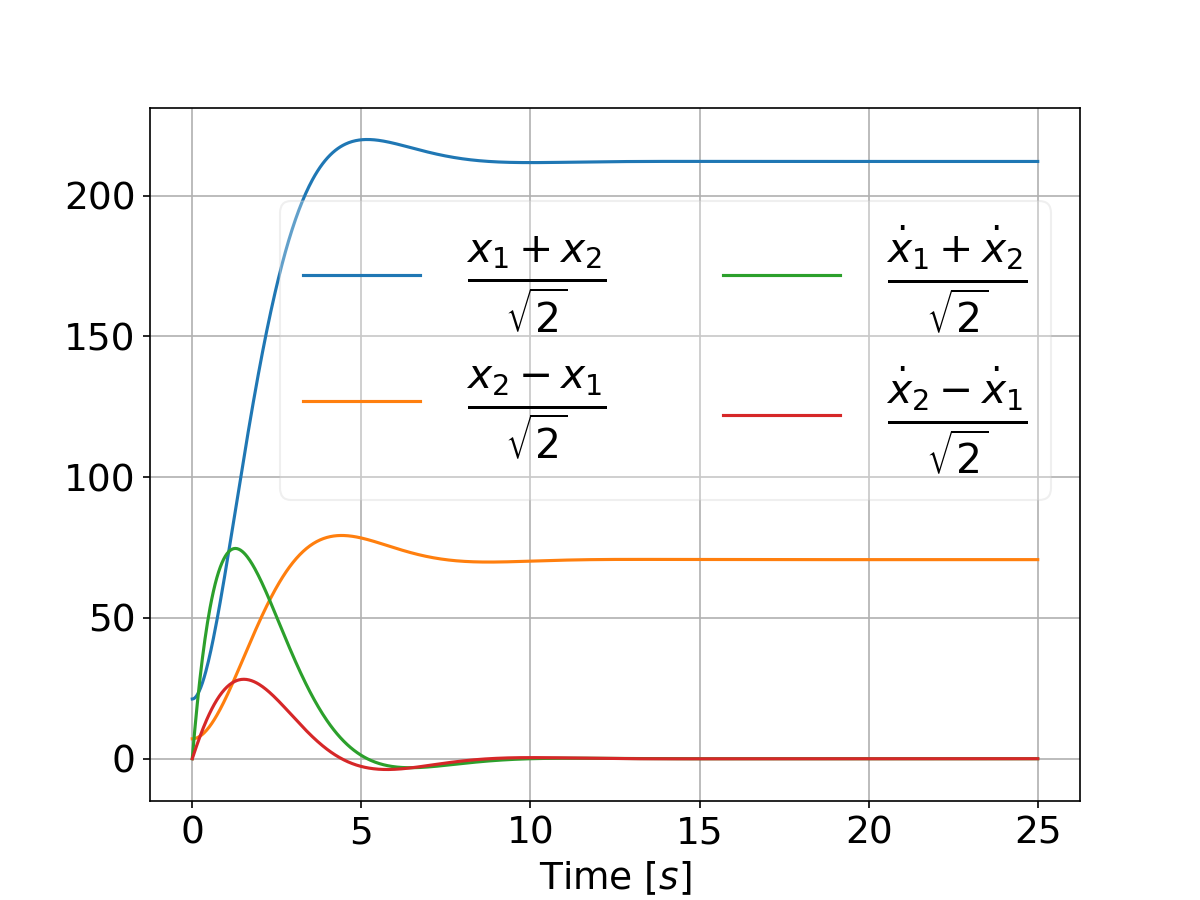
Refer This will result in the following plot that compares the two systems performance for a differential game vs an LQR:
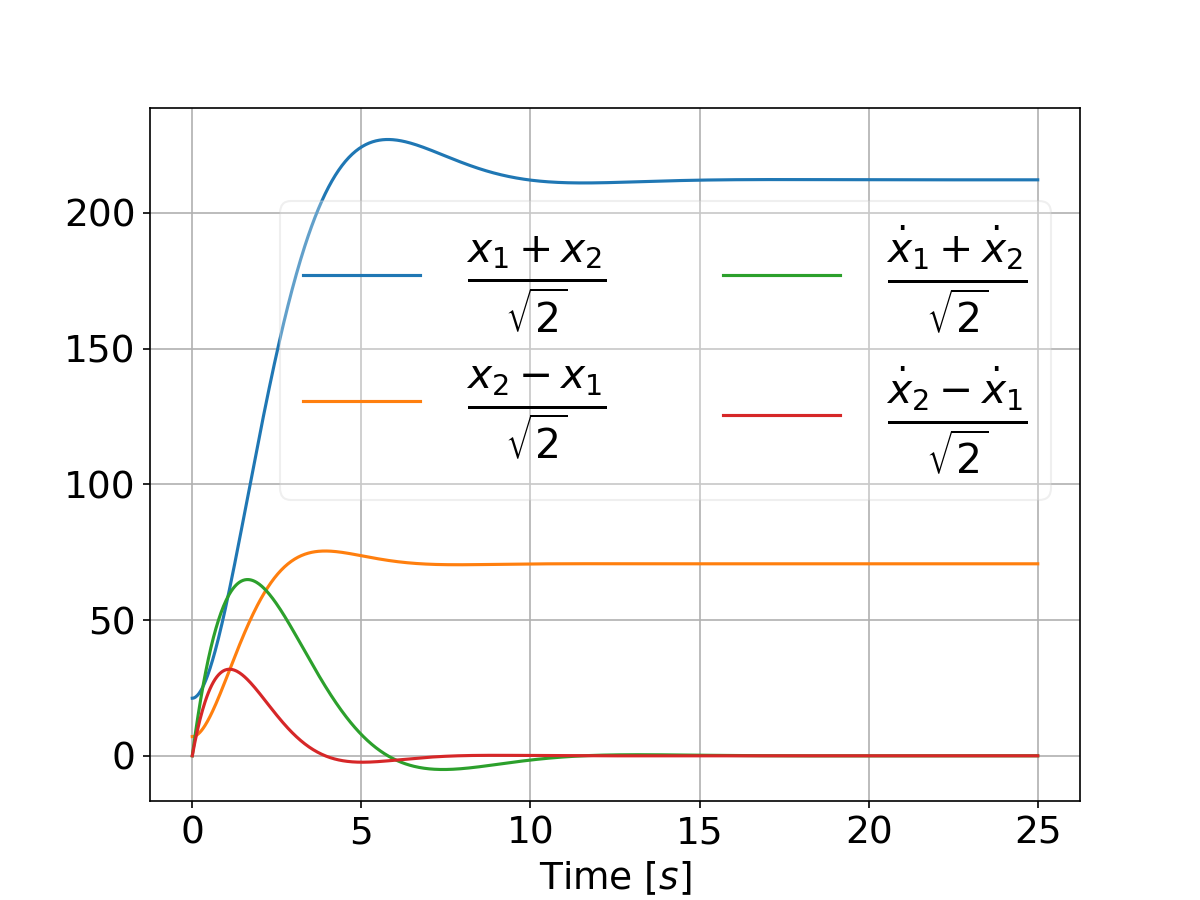
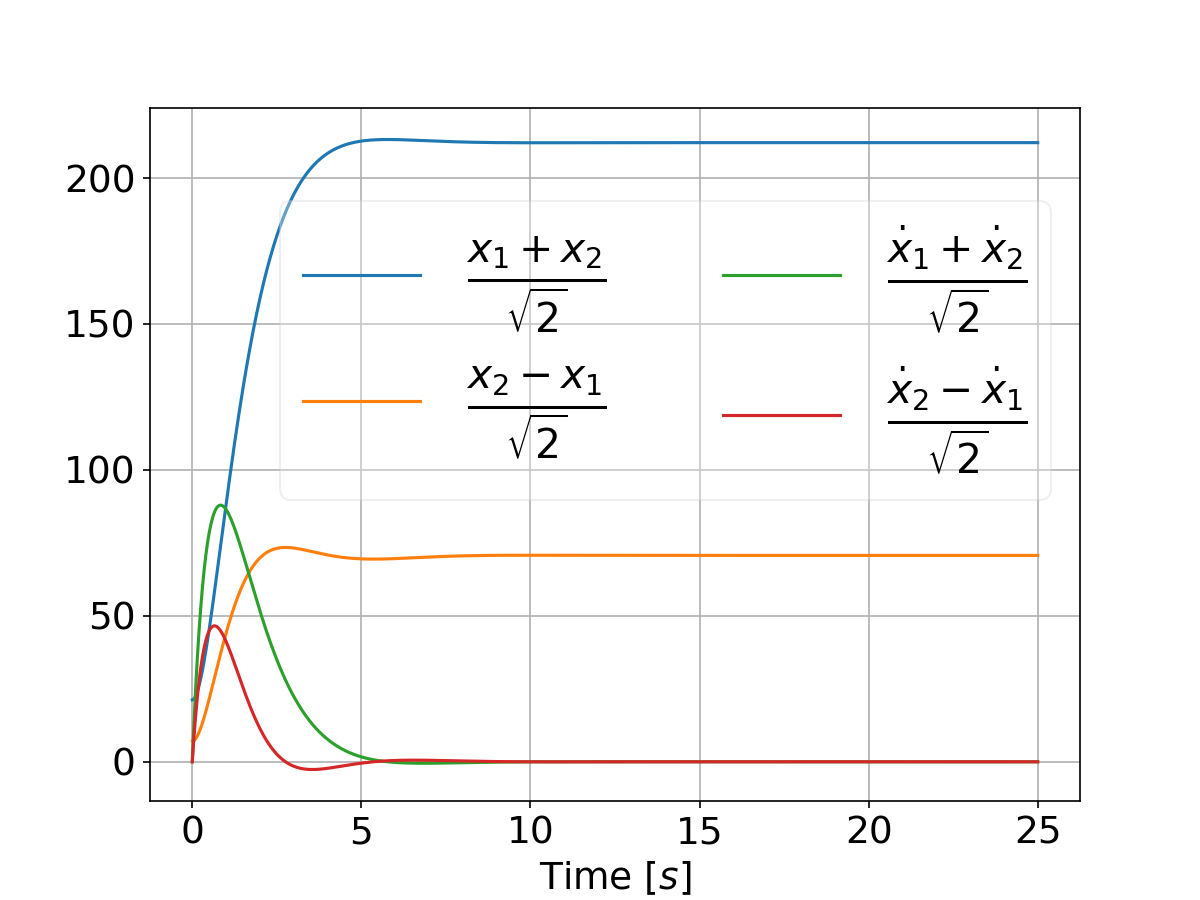
And when tweaking the weights by setting
qs = [[500, 5000]]
we have:
Acknowledgments
This research was supported in part by the Leona M. and Harry B. Helmsley Charitable Trust through the Agricultural, Biological and Cognitive Robotics Initiative and by the Marcus Endowment Fund both at Ben-Gurion University of the Negev, Israel. This research was also supported by The Israeli Smart Transportation Research Center (ISTRC) by The Technion and Bar-Ilan Universities, Israel.
![]()

![]()